Calibración¶
Este banco de trabajo contiene todos los procesos de calibración del escáner.
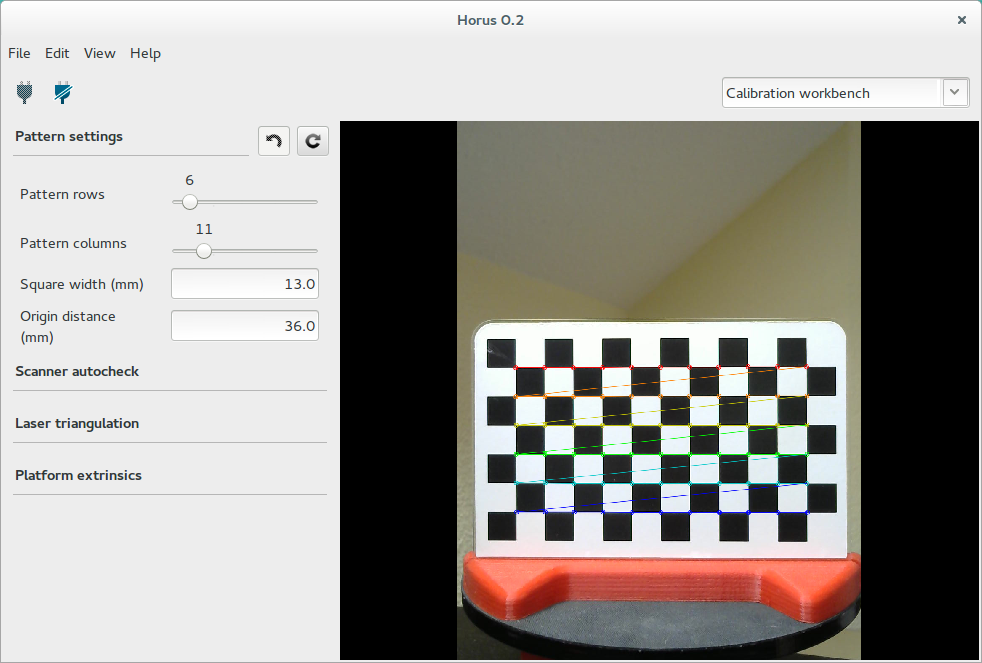
Ajustes del patrón¶
Esta sección contiene las características del patrón de calibración.
Filas del patrón: número de filas esquina del patrón. Valor por defecto 6.
Columnas del patrón: número de columnas esquina del patrón. Valor por defecto 11.
Ancho del cuadrado: valor por defecto 13 mm.
Distancia al origen el patrón: es la mínima distancia entre el origen del patrón (esquina inferior izquierda) y la base del patrón en mm. No hay un valor por defecto porque depende del patrón físico.
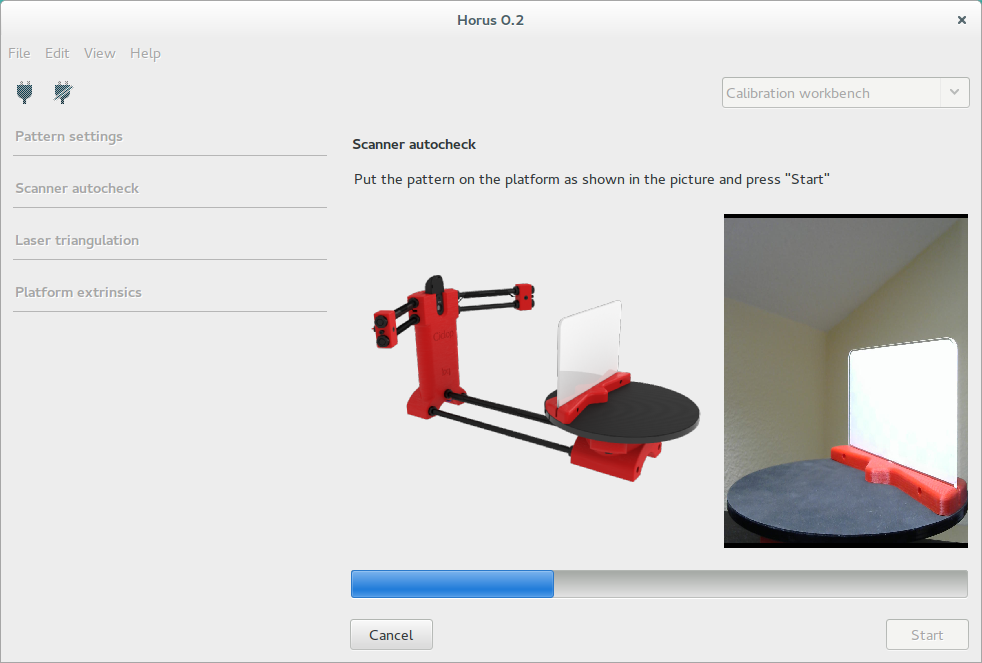
Auto comprobación¶
Esta sección contiene el proceso de auto comprobación en el que se detecta si el patrón, el motor y los láseres están configurados correctamente.
El patrón se debe colocar como se indica en la figura. Si la auto comprobación finaliza con éxito, el patrón se colocará perpendicular a la cámara. De lo contrario, se mostrará una notificación.
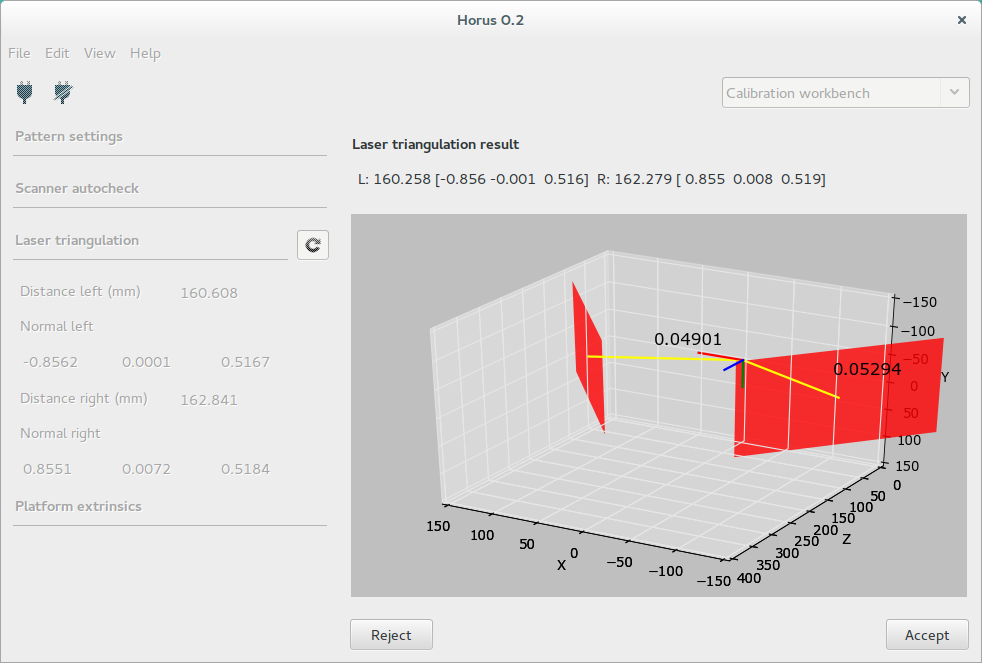
Calibración de los láseres¶
En esta sección se determinan los planos de los láseres. Cada plano se define mediante un vector normal y la distancia mínima del plano al centro óptico del a cámara.
Para comenzar la calibración, hay que colocar el patrón perpendicular a la cámara, tal y como se muestra en la figura. En cualquier momento se puede cancelar la calibración y el patrón se colocará en su posición inicial.
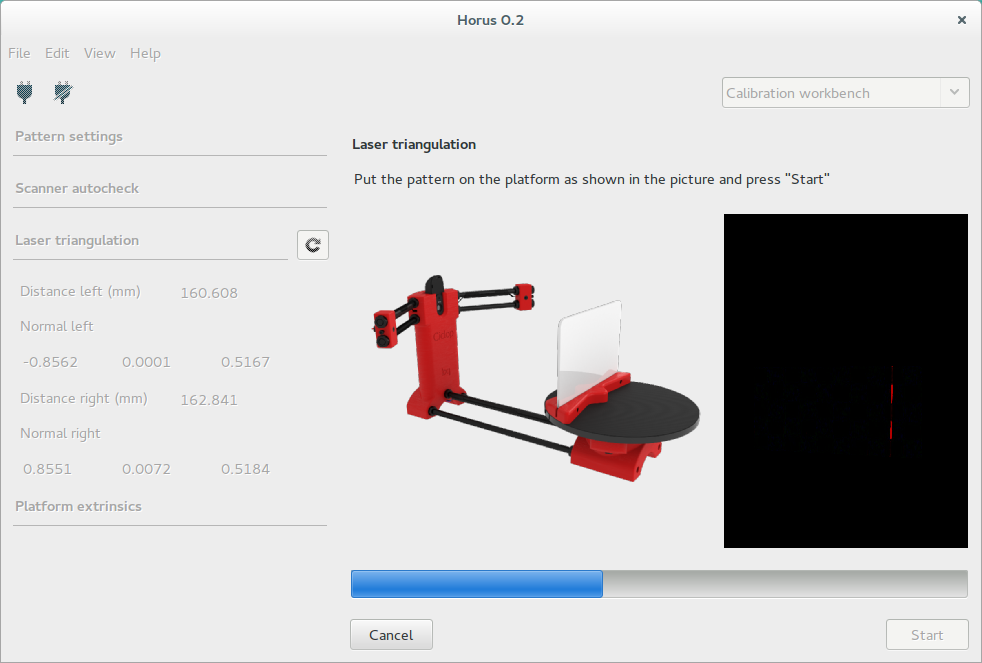
Finalmente se muestra el resultado de forma numérica y representado en 3D. También, aparece la dispersión de los puntos capturados durante la calibración. Éste valor debe ser menor que 0.1 mm. Se puede aceptar o rechazar el resultado de la calibración.
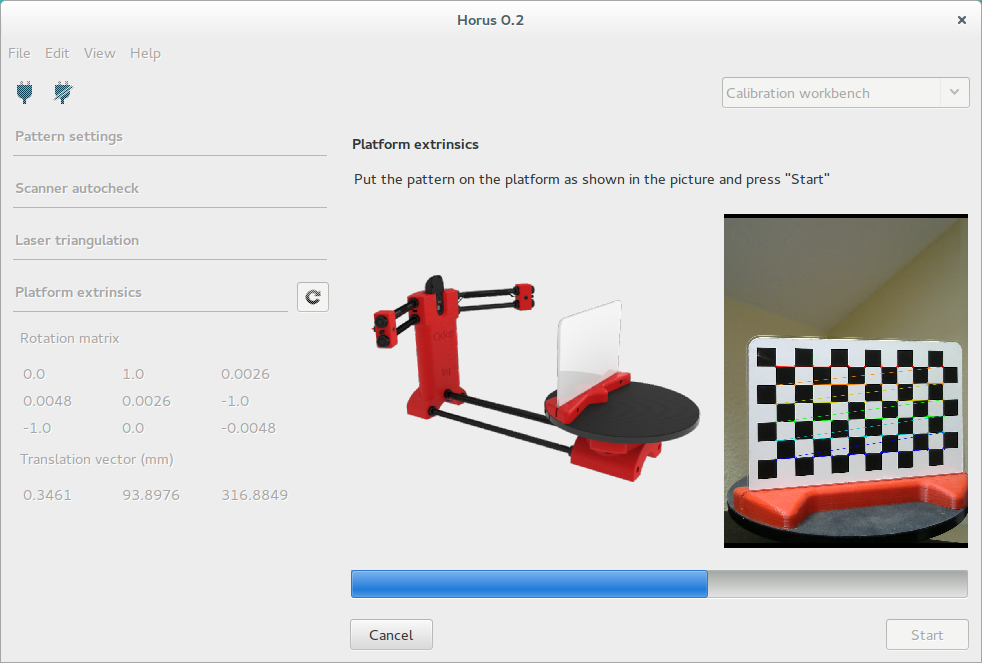
Calibración de la plataforma¶
En esta sección, se determina la matriz de transformación homogénea del centro de rotación de la plataforma giratoria con respecto al sistema de la cámara. Esto consiste en una matriz compuesta por una matriz de rotación y un vector de traslación en unidades de milímetros.
Para comenzar la calibración, hay que colocar el patrón perpendicular a la cámara, tal y como se muestra en la figura. En cualquier momento se puede cancelar la calibración y el patrón se colocará en su posición inicial.
Finalmente se muestra el resultado de forma numérica y representado en 3D. Se puede aceptar o rechazar el resultado de la calibración.
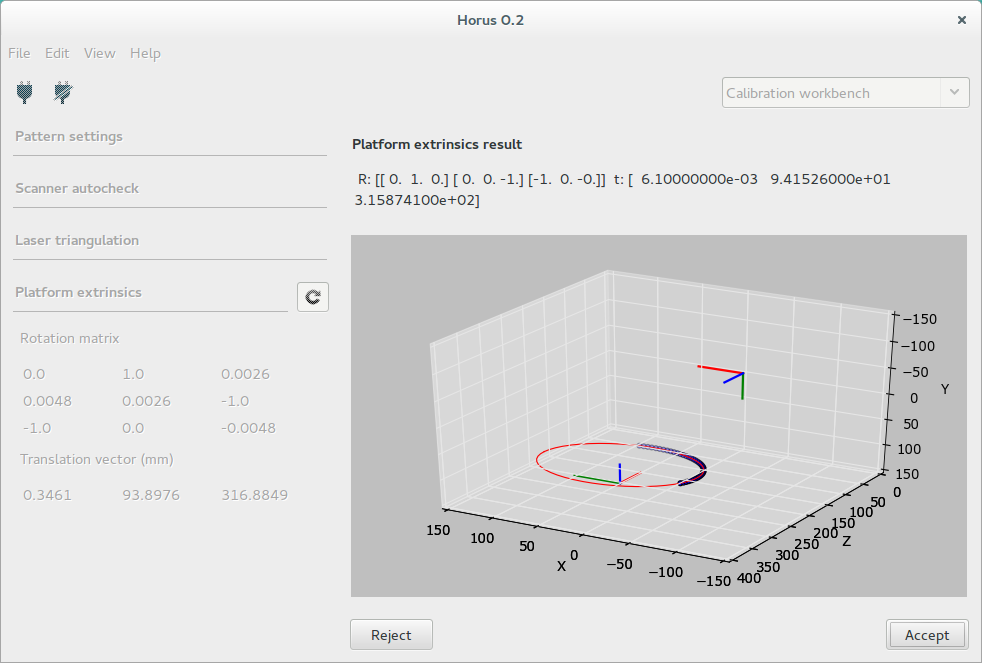
Una vez completado este proceso, el escáner ya está calibrado.
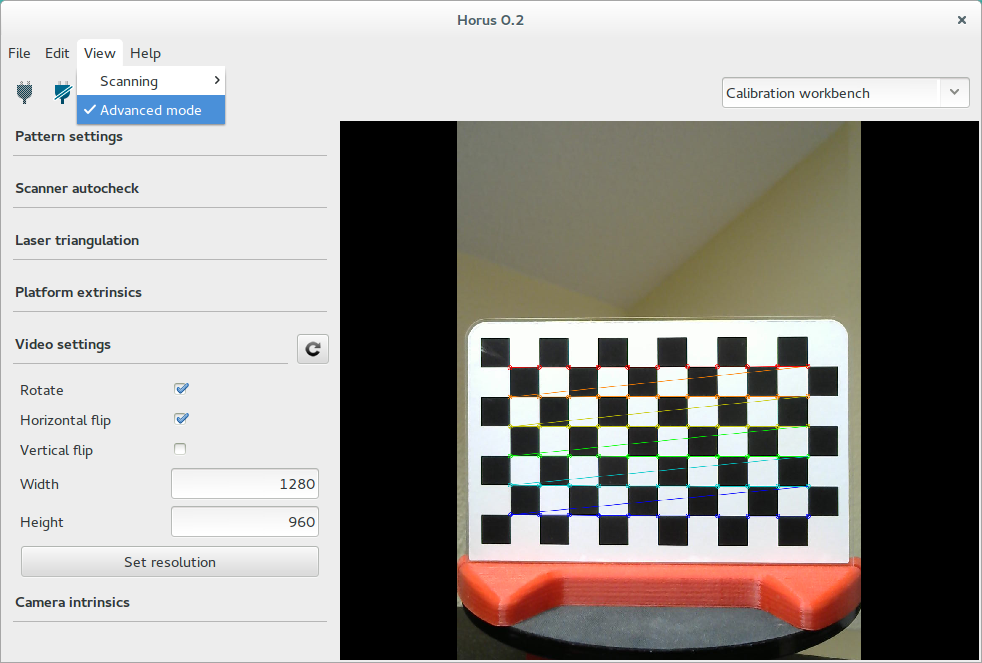
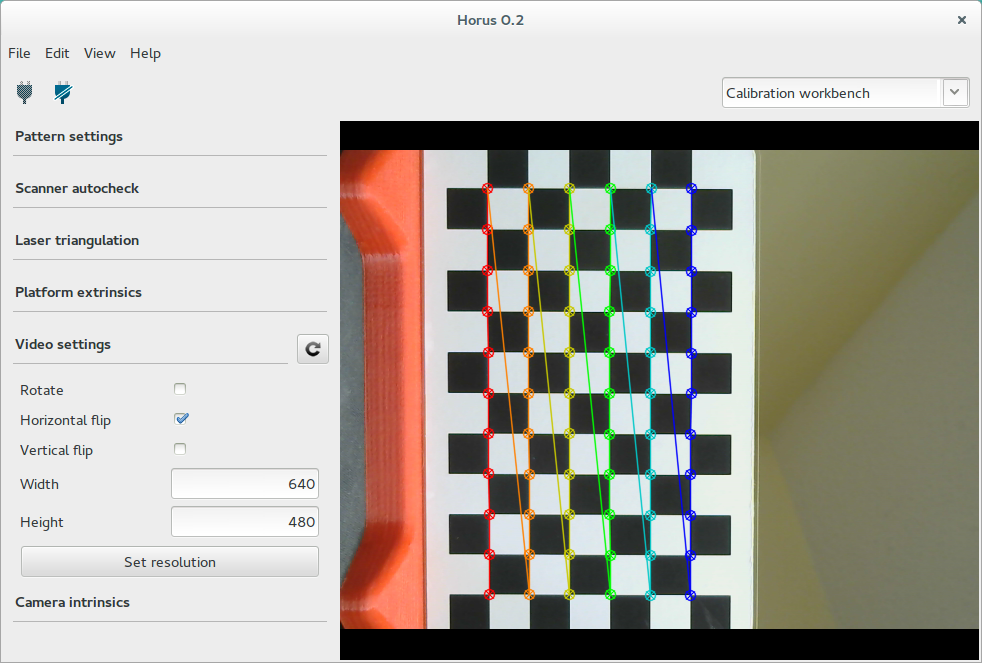
Ajustes del vídeo (avanzado)¶
Esta es una sección avanzada. Contiene los flags de rotación para el vídeo. También se puede ajustar la resolución de la cámara en px.
Consejo
Si se configura una resolución incorrecta, se recomienda la resolución válida más cercana. También, se puede volver a la anterior resolución.
Nota
En Mac OS la resolución no se puede modificar en tiempo de ejecución por la versión de OpenCV.
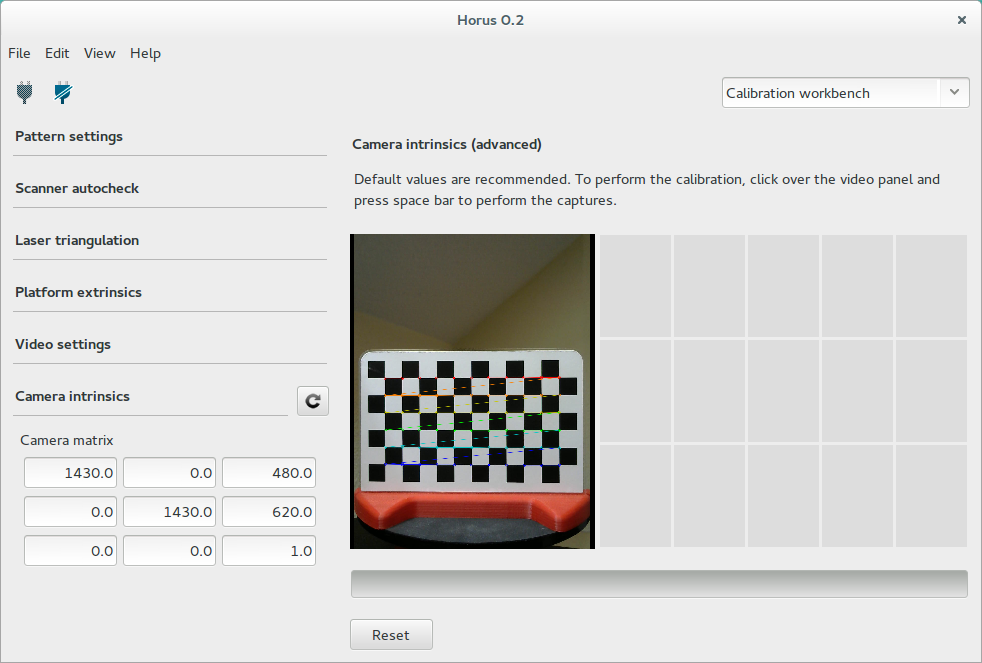
Calibración de la cámara (avanzado)¶
Esta es una sección avanzada. Se recomienda utilizar los valores por defecto.
Para comenzar esta calibración, pulsa la tecla “espacio” para capturar el patrón en distintas posiciones. Una vez tomadas todas las capturas la calibración se inicia de forma automática. En cualquier momento se pueden resetear las capturas tomadas anteriormente.
Advertencia
Si se modifican los valores intrínsecos de la cámara, se deben realizar las calibraciones de los láseres y la plataforma de nuevo.
Nota
Para habilitar el modo avanzado ve al menu Vista > Modo avanzado.